




 Back to Blog
Back to BlogBy Lauren Nagel
Alastair P. Thurlbeck and Yue Cao have developed a modeling framework for comparing different power system architectures for VTOL UAVs. They present their work in their paper, “Analysis and Modeling of UAV Power System Architectures”.
Designing a drone’s power system is rarely as simple as choosing a decent battery, motor and propeller. For drone builds that start from the ground up, one must also consider DC-DC converters, DC-AC converters, a DC bus, and a single or hybrid power source.
Like the major components of the propulsion system, variations in these elements can have an impact on system efficiency, translating into changes in drone endurance and flight time.
Further reading: Drone Building and Optimization (eBook)
To explore the differences between power system architectures, Thurlbeck and Cao designed a model that estimates the performance of different architectures based on their component parts.
They then validated the model with real-life constructions of three unique power systems, tested using the RCbenchmark Series 1780 test stand (figure 1).

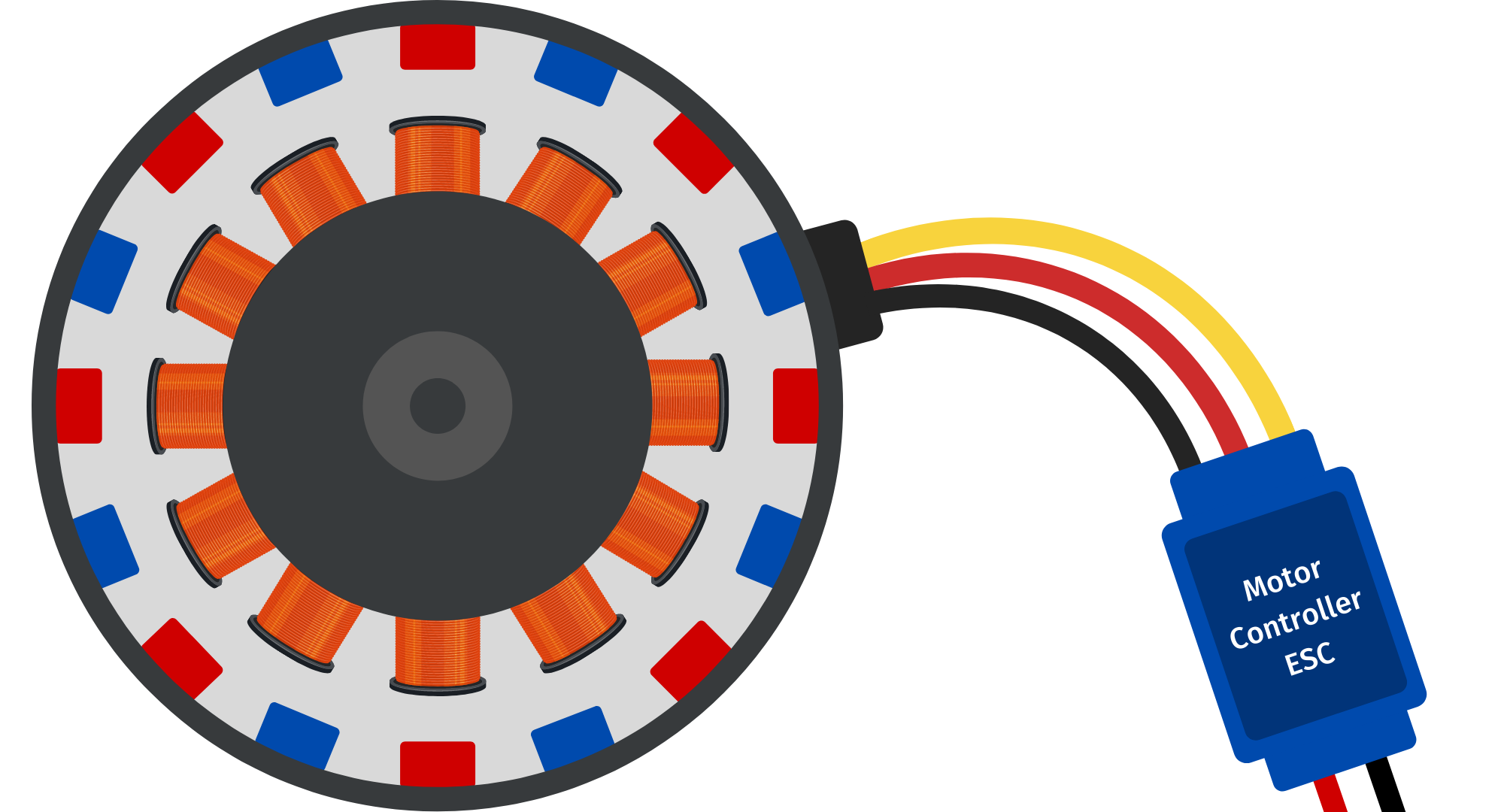
All three architectures included a battery power source, DC bus, DC-AC converter and a permanent magnet synchronous machine (PMSM) motor.
The first architecture was unique because it used a DC-DC converter between the battery and a fixed DC bus.
The second architecture excluded the DC-DC converter and used a swinging DC bus instead. The third architecture employed a hybrid power source with a battery and a fuel cell, both connected to a DC-DC converter and a common fixed DC bus (figure 2).

Figure 2: Power system architectures 1, 2 and 3 that were tested in the experiment
In their first experiment, they tested a 100KV motor (T-Motor U10II KV100) with two different propellers (T-Motor G28x9.2 and G30x10.5) to provide a realistic load.
The motor speed was swept from zero to its rated speed with the G28x9.2 propeller and to its rated current with the G30x10.5 propeller.
The Series 1780 test stand measured the thrust, torque, speed, and power to the DC-AC inverter. They then swept their model over the same torque and speed values to calculate power loss estimates.
Those results were compared to those from the physical tests, which can be seen in figure 3.
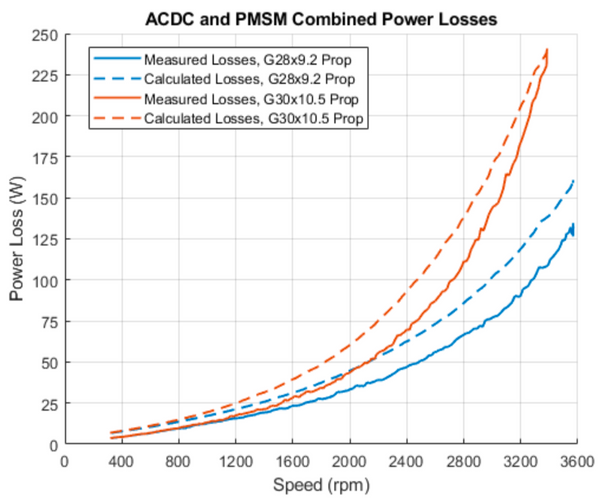
Figure 3: Power loss over a motor speed sweep for experimental and modeled data
The estimated power losses from their model paralleled the measured losses from the experimental system with a small overestimation. Based on these results, they deemed the model “sufficiently accurate for power system design purposes and analysis”.
Further reading: Brushless Motor Power and Efficiency Analysis
They next used the model to estimate the performance of a theoretical VTOL drone with each of the three power system architectures. In a simple power loss vs. thrust comparison, architecture 1 and 2 showed similar losses dominated by the motor and battery.
Architecture 3’s main power losses came from the fuel cell, followed by the motor and battery. They produced 3D plots that model the relationship between speed, torque and overall efficiency, demonstrating the highest efficiency in a high rpm and low torque condition (figure 4).

Figure 4: 3D plot of rpm, torque and overall efficiency for power system architecture 2
Their final experiments simulated each of the power architectures over a mission flight profile and determined their maximum flight times. They found that architecture 2 required the lowest input energy during the mission profile and thus had the highest efficiency of around 83%.
Architecture 3 had the lowest efficiency during the mission profile, but the highest maximum flight time of 32 minutes, compared to 25.5 and 30 minutes for architectures 1 and 2 (figure 5).

Figure 5: Maximum flight time curves for three power system architectures
Architecture 3’s main efficiency losses occurred while the fuel cell recharged the battery in flight, but it still managed the longest flight time thanks to the higher specific energy of the fuel cell, which was 1.83x higher than that of the Li-Po batteries used.
This model designed by Thurlbeck and Cao is a useful tool for designers who want to compare power system architectures without building multiple prototypes. It has the potential to save drone builders time and resources while pointing them towards their most efficient design.
Further reading: How to Increase a Drone's Flight Time and Lift Capacity




Leave a comment