




 Back to Blog
Back to Blog1. Applicable products
- Series 1520 Thrust Stand
- Series 1580 Test Stand
- Series 1585 Test Stand
- Series 1780 Test Stand
2. What describes your problem?
Please find within the following table which describes your problem. Once selected, mark down the troubleshooting points to follow.

3. Problem specific troubleshooting

3.1 My ESC does not generate a beep when powered up.
Generally speaking, the ESC shall generate a long beep from its buzzer when it is:
- Properly powered up
- Properly receiving PWM signal
Under a normal procedure, we recommend NOT to check the PWM signal box before you connect the stand to the power source:
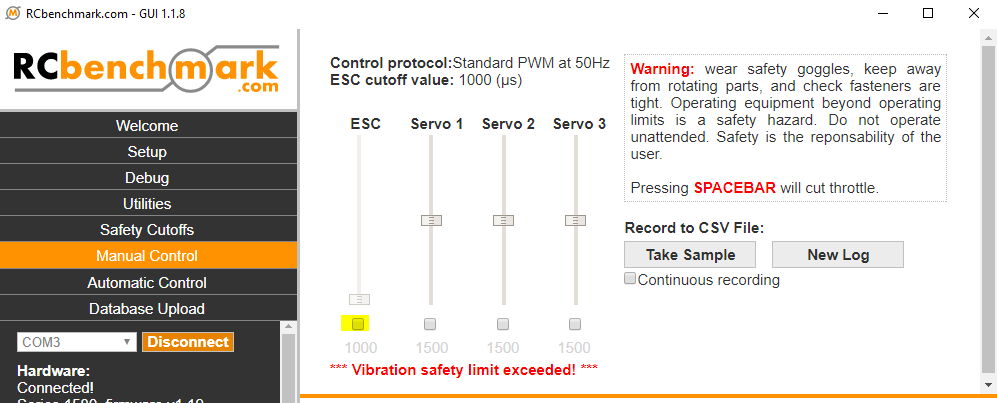
Once the ESC is powered up, you shall hear the ESC doing a constant short beep. When checking the box, the ESC shall generate a long beep to notify it receives a signal. If your ESC is still doing constant short beep after checking the ESC control box in the GUI, please follow this guideline:
- First of all, check the brand and the made of your ESC and confirm if your ESC has an embedded BEC (Battery Elimination Circuit). The BEC is a voltage regulator and provides 5 V for the internal use of the signal processing. In case that your ESC does not have an BEC built-in, you must provide an external 5V to your ESC.
- For the Series 1585 and Series 1780, there is a 5 V port on the circuit or on the Power and Control Console, you may use those ports to power up the control section of your ESC.
- For the newer version of the Series 1580, there is also the extra 5 V port on the circuit for the non-BEC ESC. If you are using the old version of Series 1580 or Series 1520, you may need to use an external power supply 5 V to power up the control section of the ESC.
- If the problem persists, or your ESC has a built-in BEC, but your ESC is still not making a long beep after checking the box in the GUI. Please check your ESC’s PWM signal input requirements, the PWM signal output from the thrust stand uses standard 50 Hz.
- Your ESC may also require a calibration at first use, please make sure that you have properly followed the procedure proposed by the manufacturer.
- Please check if your ESC is being powered with the correct voltage (HV or LV).
- If your problem still persists, please contact support@tytorobotics.com and indicate the following information:
- Subject: ESC not receiving signal
- Include the made and the model of your ESC
- The voltage that you are using
- A photo of the wire connection of your ESC
3.2 My motor does not spin even though the ESC was working properly.
If you have heard the clear long beep from your ESC, but the motor is not spinning after manipulating the throttle, follow the instructions in this guideline:
- Make sure that the input voltage to the ESC corresponds to the working voltage of your motor.
- Check the three phase wires if they are properly connected.
- Check if your motor can be paired with the ESC.
- If necessary, use an oscilloscope to check if the PWM signal was received properly from the circuit.
- Under most circumstances, we could not provide much technical support regarding a specific pairing of the ESC and motor. Please understand that we are unable to test all the ESCs in the current market and you may refer to a list of our tested equipment in the guideline SGGMEL.
3.3 All my measurements fluctuate.
The ESC and the PWM signal may not be perfect, please understand that there is a limit on how accurate the signal can be and how precisely the ESC can react to the input signal. There are also other limitations such as the self compensation and PID control of the ESC given the change of voltage and to maintain a certain RPM.
When you observe all the measurements fluctuate higher than 15%: thrust, torque, current, RPM and/or voltage, please follow this guideline:
- Check the voltage if it is consistent. LiPo batteries may lose voltage gradually, power supply shall maintain a voltage when the throttle remains the same.
- Please make sure that the RPM is under fluctuation, this can be physically heard in the lab as the motor is making significant noise.
- If you observe the RPM remains stable in the GUI, check if the current is stable. Generally speaking, the RPM and the current shall follow the same path of regulation. When you observe a stable RPM but a fluctuating current, this can be a sign of a damaged current sensor. See S15CIR for troubleshooting of the circuit on the Series 1520/1580/1585 and refer to S17PCC for troubleshooting of the Power and Control Console on the Series 1780.
- If you find the RPM and the current are stable, check the thrust and torque value. Generally speaking, the higher the RPM shall come with a higher thrust; a higher current shall also come with a higher torque. If you find the result not matching this phenomenon, you may refer to the load sensor troubleshooting guideline: S15LCS and S17LMU for more details.
- It is very unlikely that all the measurements (current, RPM, thrust, torque) fluctuate. The most likely reason that leads to this failure is the input PWM signal. Keep in mind that the PWM can sometimes be tricky and may differ with the ESC that you use. If you are using the Series 1580/1585, you may try the RC Control Board that enables more control protocol:
https://www.tytorobotics.com/products/series-1580-1585-rc-control-board
4. Problems persist?
We support all issues related to the measurement tools itself, and we can provide limited support regarding your test setup and power-train selection. If you need extended support for your specific tests, manufacturing facility or UAV, contact us at sales@tytorobotics.com. We offer extended support contracts including phone and video conference at affordable rates.
4.1 Cross-reference to other types of problem
- SITPWM: the fluctuation can potentially be due to the PWM signal
- SGGMEL: refer to the list of ESC that RCbenchmark has tested in house
4.2 Cross-reference from other types of problem
- S17ORP: RPM speed and fluctuation
- S15ORP: RPM speed and fluctuation